Members of the Mars-500 expedition continue to test the Tourist-Gulliver robotic rover. During the test, the rover is driven over a “Martian” surface designed... 10.03.2011, Sputnik International
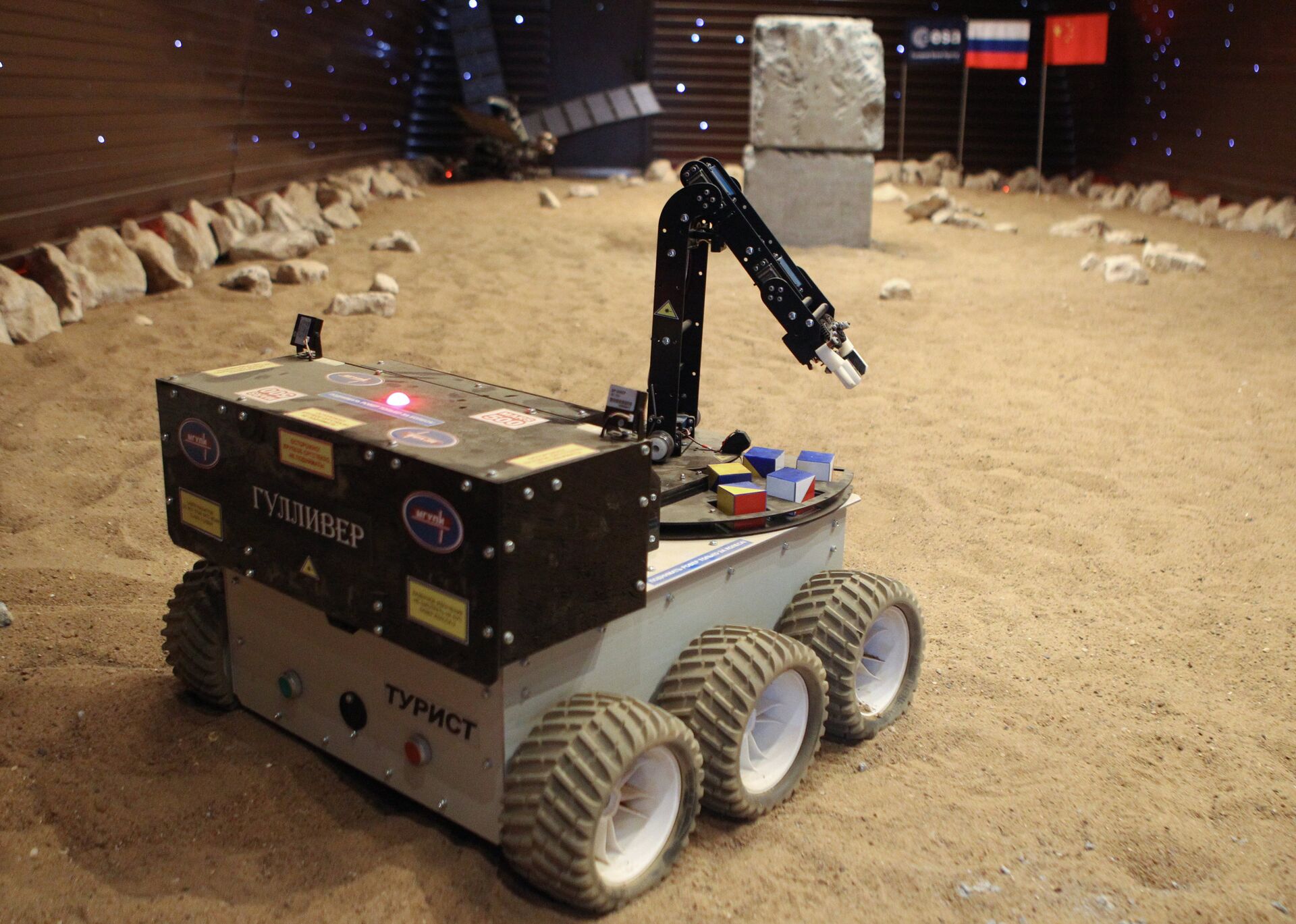
Members of the Mars-500 expedition continue to test the Tourist-Gulliver robotic rover. During the test, the rover is driven over a “Martian” surface designed by the engineers of the Institute of Biomedical Problems (IBMP RAS) to simulate the surface of Mars.
Members of the Mars-500 expedition continue to test the Tourist-Gulliver robotic rover. During the test, the rover is driven over a “Martian” surface designed by the engineers of the Institute of Biomedical Problems (IBMP RAS) to simulate the surface of Mars.
Members of the Mars-500 expedition continue to test the Tourist-Gulliver robotic rover. During the test, the rover is driven over a “Martian” surface designed by the engineers of the Institute of Biomedical Problems (IBMP RAS) to simulate the surface of Mars.
The rover program is led by Alexander Kuznetsov (photo), senior engineer of the Department of Computer Information Management Systems at the University of Instrument Engineering and Informatics (MGUPI).
The rover is designed to record data on its environment. It is equipped with two laser devices, a robotic arm, as well as six video cameras that allow the crew to remotely monitor and control the rover.
The rover's arm can collect soil samples and pieces of rock weighing up to 200 grams. It can also arrange instruments and equipment on the test surface.
The rover was first tested on the simulated Mars surface on February 14. It was controlled by Wang Yue, a Chinese member of the Mars-500 team. The Chinese “Marsonaut” was responsible for installing data-collecting sensors using Gulliver.
The Mars-500 project began in earnest on June 3, 2010, when six volunteers sealed themselves inside a simulator of a Mars mission spacecraft for 520 days. On February 12, they successfully carried out a simulated landing on Mars.
Newsfeed
0
Access to the chat has been blocked for violating the rules .
You will be able to participate again through:∞.
If you do not agree with the blocking, please use the feedback form
The discussion is closed. You can participate in the discussion within 24 hours after the publication of the article.











{kind=link}
{kind=link}