


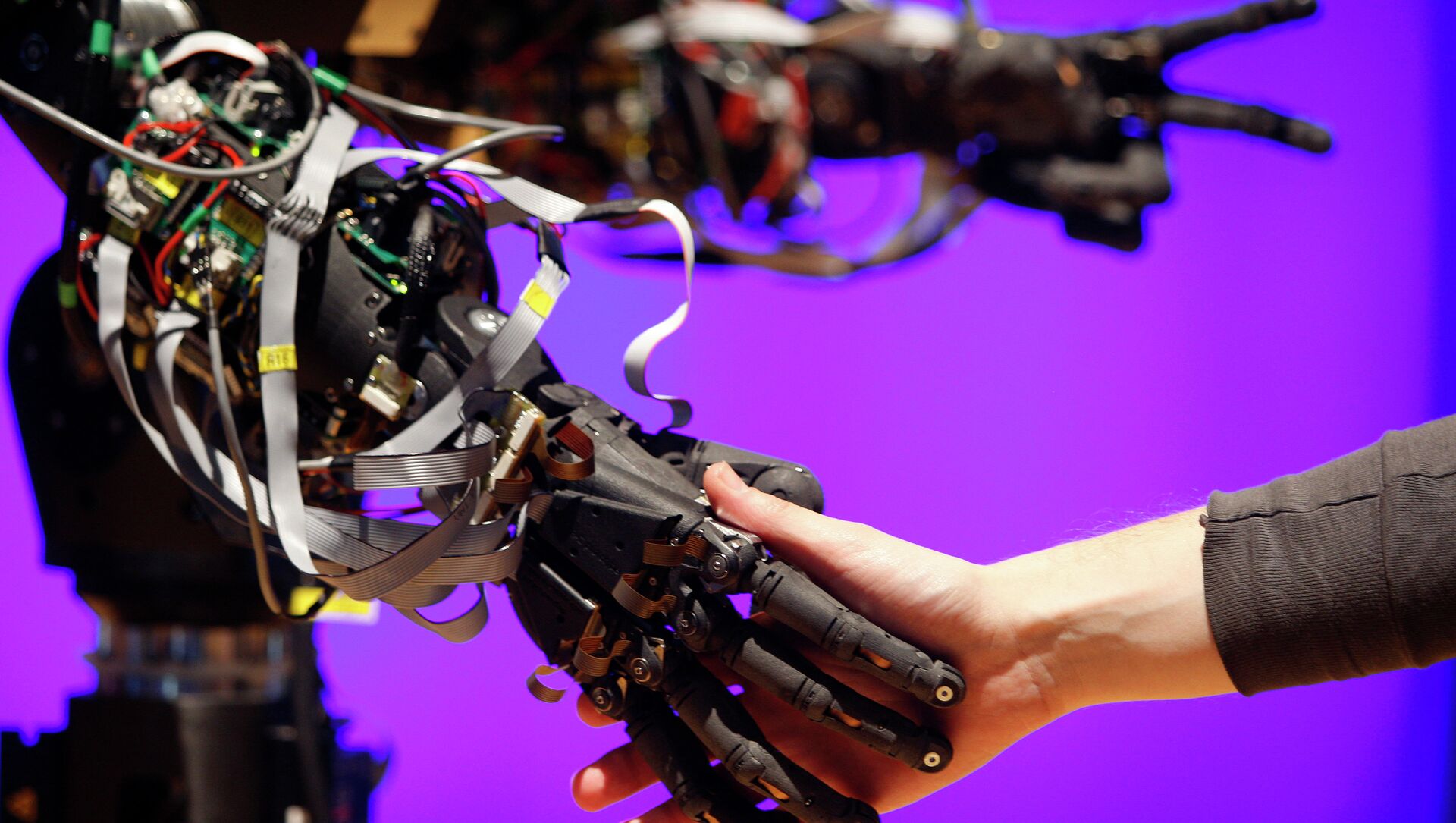
Bioengineers at the University of Illinois at Chicago (UIC) say they’ve invented a way to read human intent and correct a wrong move in case of an interruption. A new paper published in the journal PLoS One suggests the new algorithm may be integrated into various robotic systems that are designed to assist humans in their mechanical movements. One key application would be new-generation smart prostheses.
“Say you’re reaching for a piece of paper and your hand is bumped mid-reach — your eyes take time to adjust; your nerves take time to process what has happened; your brain takes time to process what has happened and even more time to get a new signal to your hand,” Justin Horowitz, first author of the study, told UIC news service.
It works because the human nervous system is relatively slow on the uptake.
#AI with a predictive, trajectory inference engine yielding reaction times faster than humans. Yeah, clairvoyance. http://t.co/VvmjDX9hrI
— Mark Wyner (@markwyner) October 9, 2015
The research team’s work demonstrates that after a move has been disrupted, the intended trajectory remains in the brain for at least a tenth of a second.
“If intent can change following disturbance, it can only do so after some period of time due to processing and communication delays in the sensorimotor system that produces new motor commands,” the study explains.

“This approach can take any ‘candidate model’ of the human arm and create a filter that estimates the intended trajectory,” the paper explains.
Imagine you’re driving down a straight road, and something makes you jerk the wheel to the left. The robot would recognize what you intended to do, and correct the swerve.
Unlike robots, humans are “slow, and because of that we have to have something that predicts the future,” Patton said.


{kind=link}
{kind=link}
{kind=link}
{kind=link}